送料机冲压行业专业人士告诉你机器人运动原理方案设计方法作者:wudoujx网址:http://www.gzwudou.net
 送料机冲压行业专业人士告诉你机器人运动原理方案设计方法
机器人工作原理
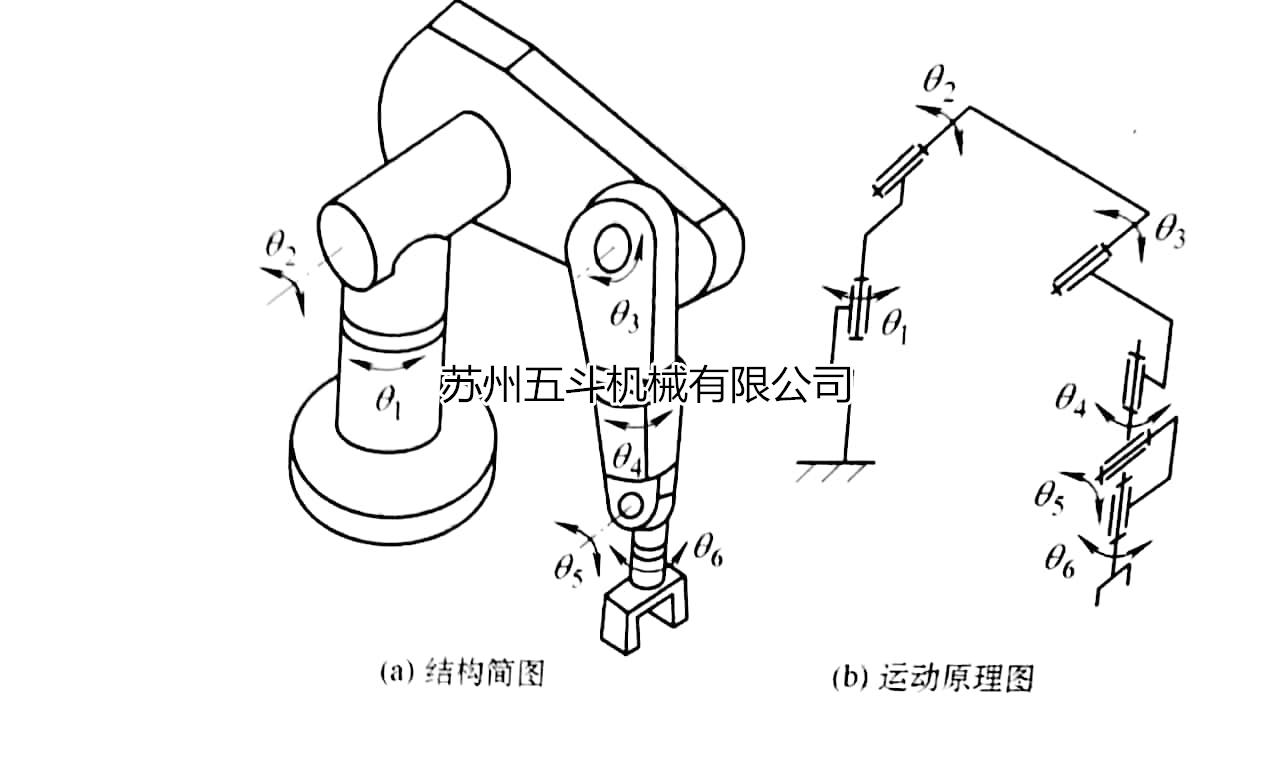
如图2.17所示。
2.17 是:通过操作机上各运动构件的运动,自动地实现手部作业的动作功能及技术要求。
|


五斗精密机械设备
WUDOUMECHANICAL
送料机冲压行业专业人士告诉你机器人运动原理方案设计方法作者:wudoujx网址:http://www.gzwudou.net
送料机冲压行业专业人士告诉你机器人运动原理方案设计方法
机器人工作原理
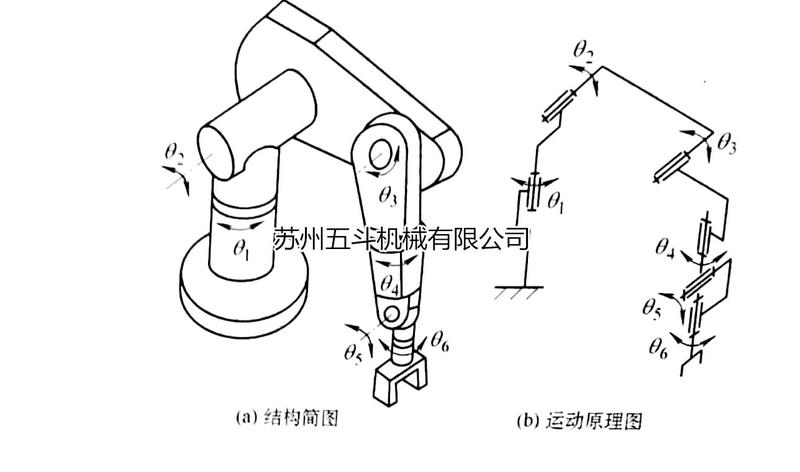
如图2.17所示。
2.17 是:通过操作机上各运动构件的运动,自动地实现手部作业的动作功能及技术要求。
|